Finally a truly distributed application for demonstrating a distributed standard.
CBC being Linux based made this simplier.
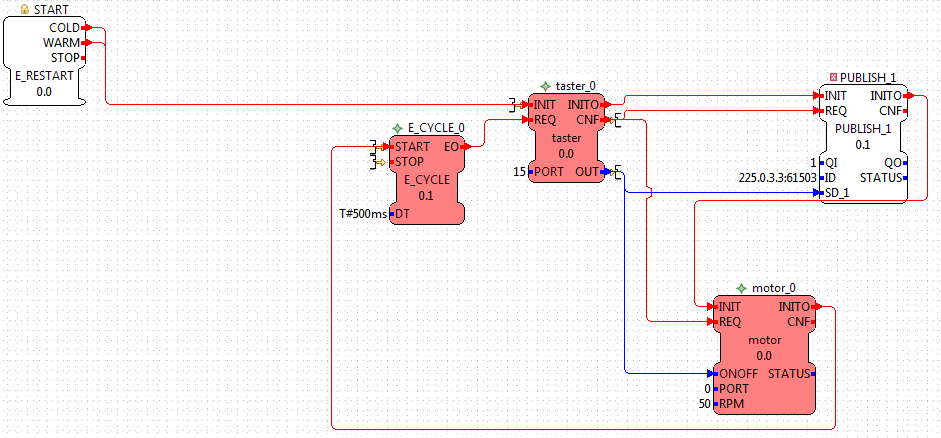
Test Case:
PC has START/STOP push buttons via IN_EVENTs. When START is pressed, a touch sensor on CBC 1 is allowed to work. When touch sensor is pressed a motor CBC1 runs and the action is mirrored on CBC2 by a motor also running. Release and both motor on CBC1 and CBC2 stop. If STOP on the PC is pressed then the touch sensor on CBC1 has no affect. Additionally a Servo motor moved on CBC 1.
Additional test: No PC: Download application and turn off PC. Touch turns on a motor on both CBC 1 and CBC2.